
Page 133 - Kỷ yếu hội thảo quốc tế: Ứng dụng công nghệ mới trong công trình xanh - lần thứ 9 (ATiGB 2024)
P. 133
124 TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT - ĐẠI HỌC ĐÀ NẴNG
ACI 209, MC 1990, B3 và GL2000. Các phép đo trong buồng khí hậu với các thông số được cài đặt để
được thực hiện trên mẫu 50 × 50 × 300 mm và 80 × mô phỏng điều kiện khí hậu nóng khô của tỉnh Đồng
150 × 500 mm trong các điều kiện bảo dưỡng thông Nai (nhiệt độ 35±2°C và độ ẩm 46±3%). Kết quả thí
thường (nhiệt độ 28°C và độ ẩm 50%) và điều kiện nghiệm được so sánh với biến dạng co ngót tính từ
bảo dưỡng khắc nghiệt (nhiệt độ 50°C và độ ẩm 5%), một số mô hình dự đoán tiêu biểu được lựa chọn theo
có và không có phụ gia hóa dẻo. GL2000 được cho là hướng dẫn của ACI 209 [10].
cung cấp những dự đoán thiên về an toàn trong mọi 2. CÁC MÔ HÌNH DỰ DOÁN BIẾN DẠNG
trường hợp. MC 1990 nhìn chung cho biến dạng co CO NGÓT
ngót thấp nhất trong mọi trường hợp. Sự khác biệt kết
quả dự đoán cao nhất và thấp nhất khoảng từ 40% đến 2.1. Mô hình B3
60% đối với các điều kiện khác nhau. Gardner [6] đã Mô hình B3 được Bažant và cộng sự phát triển từ
so sánh các dự đoán về biến dạng co ngót của ACI những năm 1970 [11], dựa trên mô tả toán học của
209, MC 1990, B3 và GL2000 với các kết quả đo hơn 10 hiện tượng vật lý ảnh hưởng đến từ biến và co
thực nghiệm được đưa ra trong ngân hàng dữ liệu ngót. Mô hình này tỏ ra phù hợp trong ứng dụng đối
RILEM dành cho bê tông cường độ thông thường. với các kết cấu đơn giản cũng như phức tạp. Biến
Gardner đi đến kết luận rằng GL2000 và B3 có khả dạng co ngót được tính bởi biểu thức (1):
năng dự đoán độ co ngót tốt hơn đáng kể so với các ( , t t ) = − k S t ) (1)
( −t
mô hình khác. sh c sh h c
)
Nhiệt độ và độ ẩm môi trường là các yếu tố chính Trong đó, sh ( , t t là biến dạng co ngót tại thời
c
ảnh hưởng đến biến dạng co ngót. Trong các mô hình, điểm t (ngày) kể từ khi bê tông bắt đầu khô - t
các giá trị này được khuyến nghị dựa trên thí nghiệm c
với các điều kiện khác nhau. Do đó, đánh giá biến (ngày); sh là biến dạng co ngót tới hạn; k là hệ số
h
)
dạng co ngót dưới ảnh hưởng của môi trường thực tế ảnh hưởng độ ẩm; ( −t là hàm thời gian.
S t
tại địa phương là cần thiết. Theo Ban Quản lý các khu c
công nghiệp Đồng Nai (diza.dongnai.gov.vn), Đồng 2.2. Mô hình MC90-99
Nai nằm trong khu vực nhiệt đới gió mùa cận xích Năm 1990, CEB đã trình bày một mô hình dự
đạo, có mùa khô và mùa mưa tương phản nhau. Mùa đoán biến dạng co ngót và từ biến trong bê tông do
mưa kéo dài khoảng 6 ÷ 7 tháng (từ tháng 5 đến tháng Muller và Hilsdorf phát triển [12]. Mô hình này đã
11). Nhiệt độ trung bình mùa mưa dao động trong được sửa đổi vào năm 1999 cho bê tông thường và bê
khoảng 26 ÷ 26,8°C. Mùa khô bắt đầu từ tháng 12 tông cường độ cao, biến dạng co ngót tổng được tách
đến tháng 3 năm sau (khoảng 5 ÷ 6 tháng). Nhiệt độ thành các thành phần co ngót tự sinh và co ngót khô,
trung bình mùa khô từ 25,4 ÷ 26,7°C. Nhiệt độ chênh và nó được gọi là CEB MC90-99. Biến dạng co ngót
lệch giữa tháng cao nhất và tháng thấp nhất khoảng được tính bởi biểu thức (2) - (4):
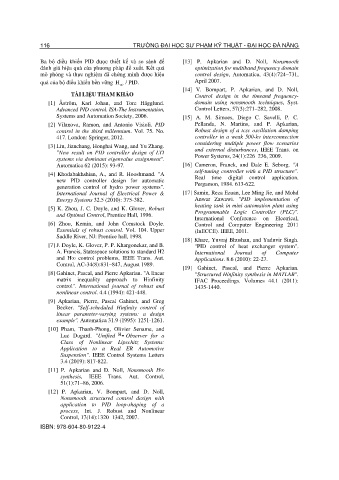
4,8°C. Theo QCVN 02:2022/BXD [8], biểu đồ nhiệt ( ,t t ) = ( ) + t ( ,t t ) (2)
độ cao nhất và độ ẩm thấp thấp nhất (trung bình) của sh c cas cds c
=
t
tỉnh Đồng Nai được mô tả trong Hình 1. cas ( ) cas 0 ( f cm 28 ) as ( ) t (3)
( , t t ) ( f ) ( ) ( − t t ) (4)
=
h
cds c cds 0 cm 28 RH ds c
Trong đó, ( , t t ) là biến dạng co ngót tổng;
sh c
cas ( ) t là co ngót tự sinh; cds ( , t t c ) là co ngót khô tại
thời điểm t (ngày) kể từ khi bê tông bắt đầu khô - t
c
(ngày).
2.3. Mô hình GL2000
Mô hình GL2000 được đề xuất bởi Gardner và
Lockman vào năm 2001, mô hình này là sự sửa đổi
của mô hình GZ Atlanta 97 (được thực hiện để phù
hợp với các hướng dẫn của ACI 209) [13]. Ngoại trừ
cường độ nén của bê tông, mô hình chỉ yêu cầu dữ
liệu đầu vào có sẵn cho kỹ sư tại thời điểm thiết kế.
Hình 1. Biểu đồ nhiệt độ cao nhất Biến dạng co ngót được tính bởi biểu thức (5):
và độ ẩm thấp nhất của tỉnh Đồng Nai [8]
=
( ) ( −
Trong nghiên cứu này, biến dạng co ngót của bê sh ( , t t c ) h t t c ) (5)
shu
tông được đo đạc theo tiêu chuẩn ASTM C157 [9].
Sau khi chế tạo, các mẫu bê tông được bảo dưỡng
ISBN: 978-604-80-9779-0