
Page 218 - Kỷ yếu hội thảo quốc tế: Ứng dụng công nghệ mới trong công trình xanh - lần thứ 9 (ATiGB 2024)
P. 218
th
HỘI THẢO QUỐC TẾ ATiGB LẦN THỨ CHÍN - The 9 ATiGB 2024 209
• Bài viết cung cấp mô hình toán học chi tiết của
hệ thống máy bay bốn cánh quạt và chứng minh tính
hiệu quả của bộ điều khiển PID / H thông qua các
kịch bản thực nghiệm, cải thiện độ ổn định và khả
năng chống nhiễu.
Các phần còn lại của bài viết này được trình bày
như sau: Mục 2 trình bày về Hệ thống máy bay bốn
cánh quạt. Mục 3 trình bày về Thiết kế bộ điều khiển.
Kết quả thực nghiệm sẽ được trình bày trong Mục 4.
Mục 5 là kết luận của bài viết.
2. HỆ THỐNG MÁY BAY BỐN CÁNH QUẠT
2.1. Cấu trúc của hệ thống
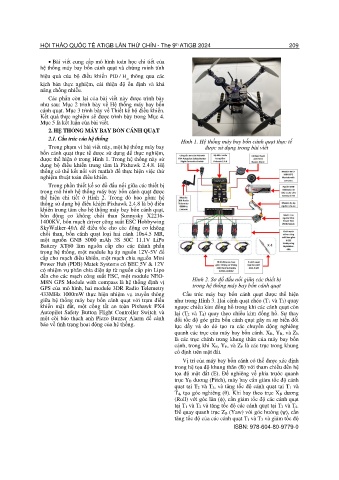
Hình 1. Hệ thống máy bay bốn cánh quạt thực tế
Trong phạm vi bài viết này, một hệ thống máy bay được sử dụng trong bài viết
bốn cánh quạt thực tế được sử dụng để thực nghiệm,
được thể hiện ở trong Hình 1. Trong hệ thống này sử
dụng bộ điều khiển trung tâm là Pixhawk 2.4.8. Hệ
thống có thể kết nối với matlab để thực hiện việc thử
nghiệm thuật toán điều khiển.
Trong phần thiết kế sơ đồ đấu nối giữa các thiết bị
trong mô hình hệ thống máy bay bốn cánh quạt được
thể hiện chi tiết ở Hình 2. Trong đó bao gồm: hệ
thống sử dụng bộ điều khiển Pixhawk 2.4.8 là bộ điều
khiển trung tâm cho hệ thống máy bay bốn cánh quạt,
bốn động cơ không chổi than Sunnysky X2216-
1400KV, bốn mạch driver công suất ESC Hobbywing
SkyWalker-40A để điều tốc cho các động cơ không
chổi than, bốn cánh quạt loại hai cánh 10x4.5 MR,
một nguồn GNB 5000 mAh 3S 50C 11.1V LiPo
Battery XT60 làm nguồn cấp cho các thành phần
trong hệ thống, một module hạ áp nguồn 12V-5V để
cấp cho mạch điều khiển, một mạch chia nguồn Mini
Power Hub (PDB) Matek Systems có BEC 5V & 12V
có nhiệm vụ phân chia điện áp từ nguồn cấp pin Lipo
đến cho các mạch công suất ESC, một module NEO-
M8N GPS Module with compass là hệ thống định vị Hình 2. Sơ đồ đấu nối giữa các thiết bị
GPS của mô hình, hai module 3DR Radio Telemetry trong hệ thống máy bay bốn cánh quạt
433MHz 1000mW thực hiện nhiệm vụ truyền thông Cấu trúc máy bay bốn cánh quạt được thể hiện
giữa hệ thống máy bay bốn cánh quạt với trạm điều như trong Hình 3. Hai cánh quạt chéo (T1 và T3) quay
khiển mặt đất, một công tắt an toàn Pixhawk PX4 ngược chiều kim đồng hồ trong khi các cánh quạt còn
Autopilot Safety Button Flight Controller Switch và lại (T2 và T4) quay theo chiều kim đồng hồ. Sự thay
một còi báo thạch anh Piezo Buzzer Alarm để cảnh đổi tốc độ góc giữa bốn cánh quạt gây ra sự biến đổi
báo về tình trạng hoạt động của hệ thống. lực đẩy và do đó tạo ra các chuyển động nghiêng
quanh các trục của máy bay bốn cánh. XB, YB, và ZB
là các trục chính trong khung thân của máy bay bốn
cánh, trong khi XE, YE, và ZE là các trục trong khung
cố định trên mặt đất.
Vị trí của máy bay bốn cánh có thể được xác định
trong hệ tọa độ khung thân (B) với tham chiếu đến hệ
tọa độ mặt đất (E). Để nghiêng về phía trước quanh
trục YB dương (Pitch), máy bay cần giảm tốc độ cánh
quạt tại T2 và T3, và tăng tốc độ cánh quạt tại T1 và
T4, tạo góc nghiêng (θ). Khi bay theo trục XB dương
(Roll) với góc lăn (ϕ), cần giảm tốc độ các cánh quạt
tại T1 và T2 và tăng tốc độ các cánh quạt tại T3 và T4.
Để quay quanh trục ZB (Yaw) với góc hướng (ψ), cần
tăng tốc độ của các cánh quạt T1 và T3 và giảm tốc độ
ISBN: 978-604-80-9779-0