
Page 107 - Kỷ yếu hội thảo khoa học quốc tế - Ứng dụng công nghệ mới trong công trình xanh , lần thứ 8
P. 107
90 TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT - ĐẠI HỌC ĐÀ NẴNG
II. PHÂN TÍCH ĐỘNG HỌC NGHỊCH Từ đó ta xác định được các góc quay:
ROBOT 3-RRPS VÀ ROBOT 3-RPSP
Cấu tạo của hai mô hình robot song song 3-RRPS arctan y AB i
và 3-RPSP sẽ được trình bày trong phần này. Nghiên = x (7)
i
cứu này chỉ quan tâm về vùng làm việc của 2 robot AB i
trên nên nhóm tác giả chỉ trình bày tóm tắt phân tích
động học nghịch của robot. Chi tiết bài toán động học
của hai robot đã được trình bày trong [8, 9].
2.1. Phân tích động học nghịch robot song song
3-RRPS
Robot song song 3-RRPS có 6 bậc tự do với
3 chân liên kết giữa tấm đế cố định và tấm di động
(Hình 1-a). Mỗi chân robot có 2 khớp bị động và hai
khớp chủ động. Khớp chủ động thứ nhất là khớp quay
quanh tâm vòng tròn ray trượt của tấm đế cố định và
khớp tịnh tiến (ký hiệu mũi tên màu xanh trên hình
1-a). Hai khớp bị động là khớp quay liên kết giữa con
trượt trên tấm đế cố định và xylanh của khớp tịnh
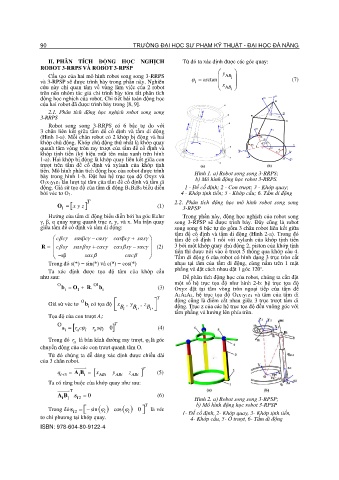
tiến. Mô hình phân tích động học của robot được trình Hình 1. a) Robot song song 3-RRPS;
bày trong hình 1-b. Đặt hai hệ trục tọa độ Oxyz và
O1x1y1z1 lần lượt tại tâm của tấm đế cố định và tấm di b) Mô hình động học robot 3-RRPS.
động. Giả sử tọa độ của tấm di động B1B2B3 biểu diễn 1 - Đế cố định; 2 - Con trượt; 3 - Khớp quay;
bởi véc tơ O1. 4 - Khớp tịnh tiến; 5 - Khớp cầu; 6. Tấm di động
T 2.2. Phân tích động học mô hình robot song song
x y
O 1 = z (1) 3-RPSP
Hướng của tấm di động biểu diễn bởi ba góc Euler Trong phần này, động học nghịch của robot song
γ, β, α quay xung quanh trục z, y, và x. Ma trận quay song 3-RPSP sẽ được trình bày. Đây cũng là robot
giữa tấm đế cố định và tấm di động: song song 6 bậc tự do gồm 3 chân robot liên kết giữa
tấm đế cố định và tấm di động (Hình 2-a). Trong đó
c c s sβc − c s c sβc + s s tấm đế cố định 1 nối với xylanh của khớp tịnh tiến
R = c s s s s + c c c s s − s c (2) 3 bởi một khớp quay chủ động 2, piston của khớp tịnh
tiến thì được nối vào ổ trượt 5 thông qua khớp cầu 4.
− sβ s c c c Tấm di động 6 của robot có hình dạng 3 trục tròn cắt
Trong đó s(*) = sin(*) và c(*) = cos(*) nhau tại tâm của tấm di động, cùng nằm trên 1 mặt
o
Ta xác định được tọa độ tâm của khớp cầu phẳng và đặt cách nhau đặt 1 góc 120 .
như sau: Để phân tích động học của robot, chúng ta cần đặt
O = b + O . b (3) một số hệ trục tọa độ như hình 2-b: hệ trục tọa độ
O1
R
i 1 i Oxyz đặt tại tâm vòng tròn ngoại tiếp của tấm đế
A1A2A3, hệ trục tọa độ O1x1y1z1 và tâm của tấm di
T
O
Giả sử véc tơ b có tọa độ x , y , z động cũng là điểm cắt nhau giữa 3 trục trượt tấm di
i B i B i , B i , động. Trục z của các hệ trục tọa độ đều vuông góc với
Tọa độ của con trượt Ai: tấm phẳng và hướng lên phía trên.
O T
a i r c= a i r s a i 0 (4)
Trong đó r là bán kính đường ray trượt, φi là góc
a
chuyển động của các con trượt quanh tâm O.
Từ đó chúng ta dễ dàng xác định được chiều dài
của 3 chân robot.
T
q i+ 3 = A B = x ABi y ABi z ABi (5)
i i
Ta có ràng buộc của khớp quay như sau:
T
A B i .s 2 i = 0 (6) Hình 2. a) Robot song song 3-RPSP;
i
Trong đó s 2 i − sin ( ) cos = i ( ) 0 i T là véc b) Mô hình động học robot 3-RPSP
tơ chỉ phương tại khớp quay. 1- Đế cố định, 2- Khớp quay, 3- Khớp tịnh tiến,
4- Khớp cầu, 5- Ổ trượt, 6- Tấm di động
ISBN: 978-604-80-9122-4